The essential part of any robotic system is the actuators. So when designing HIRO, Swift started by innovating a new high-performance series elastic actuator that was energy efficient, had the highest power-to-weight ratio on the market, and had a sleek, compact design.
Previous
Next
Strength, Dexterity & Perception
Hiro was built for successful interaction when robots are needed to work alongside humans. The Series elastic element within the design allows the robotic joint to come into contact with a human safely, without injury or damage.
Evolving Mobile Platform
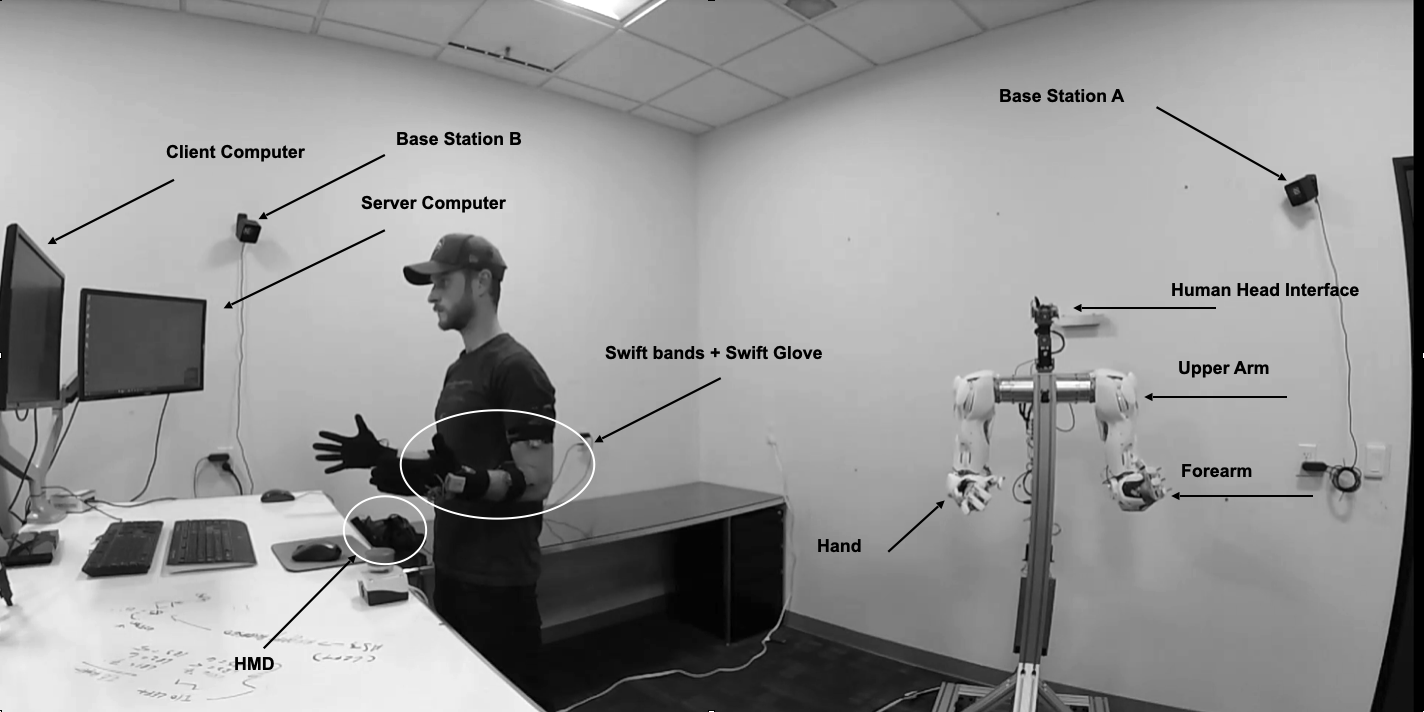
As the HIRO system expands into a more advanced human-inspired mobile platform, Swift continues to lead the way with innovative wireless arm and hand bands paired with precision control, 360o stereoscopic Augmented Virtual Overlays with Vector Gaze, and tactile feedback.
Available feedback: stereoscopic vision, auditory, vibratory, thermal, full-body exoskeletons with force feedback